ARA provides uncrewed, ground vehicle autonomy solutions for off-road environments. Off-road autonomy presents a set of unique challenges when compared to on-road applications, including dense, cluttered terrain, as well as a lack of GPS and detailed maps. ARA takes a modular approach to these challenges, aiming to provide a full-stack solution that is easily integrated on a variety of vehicles and platforms.
Modular/Quick Integration for Drive-by-Wire Platforms and Perception Sensors
Advanced Capabilities
Individual Wheel Placement
ARA’s advanced software takes into account individual wheel placement and factors in vehicle underbody clearance, roll, and pitch, enabling navigation in extremely uneven terrain without high-center or tip-over risk.
Self-Supervised Mobility Learning
Our software uses self-supervised mobility learning to determine the physical characteristics of a vehicle to optimize performance and ease installation onto new platforms.
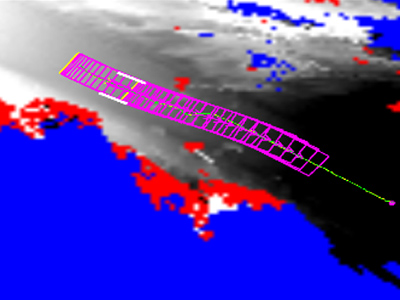
Unsupervised World Model Adaptation
Our software uses self-supervised mobility learning to determine the physical characteristics of a vehicle to optimize performance and ease installation onto new platforms.
Advanced Capabilities
Individual Wheel Placement
ARA’s advanced software takes into account individual wheel placement and factors in vehicle underbody clearance, roll, and pitch, enabling navigation in extremely uneven terrain without high-center or tip-over risk.
Self-Supervised Mobility Learning
Our software uses self-supervised mobility learning to determine the physical characteristics of a vehicle to optimize performance and ease installation onto new platforms.
Unsupervised World Model Adaptation
Our software employs unsupervised world model adaptation to learn interpretation of world model data (confidence, error rate, probabilistic terrain traversability estimates.)
Vehicle and Sensor Agnostic
ARA's autonomy solutions are highly modular, simplifying integration with new platforms, new sensors, and new planning algorithms.
Visit neyarobotics.com for more information on ARA's Off-Road Autonomy Solutions
By clicking "OK", you agree to the storing of cookies on your device to enhance site navigation, analyze site usage and assist in our marketing efforts.